Hydrogels describe a broad class of heavily swollen crosslinked polymer networks. The swelling of a hydrogels equilibrated in solution can be affected by different environmental stimuli, including the pH and temperature of the solution. In DNA hydrogels, it can also be triggered by a reaction with a complementary DNA strand. Differential swelling of multi-layered structures can further be exploited to design controllable self-folding structures. We aim to develop constitutive models for the nonequilibrium swelling and mechanical behavior of hydrogels. We then apply the models to investigate the design of shape changing hydrogel structures and devices, and hydrogel robots.
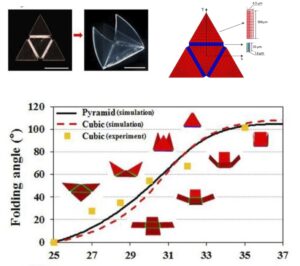

Figure 1: Simulations of the folding of grippers composed of stiff plates connected by pNIPAM hinges that exhibit a gradient of crosslinkiing, which translate to a gradient of swelling. The yellow squares indicate experimental data which shows good agreement with simulations.
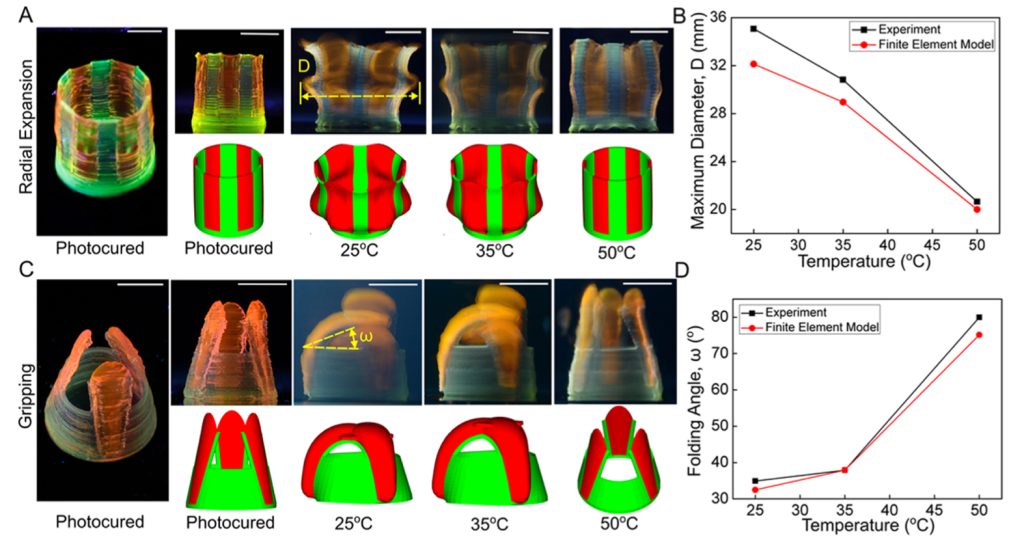
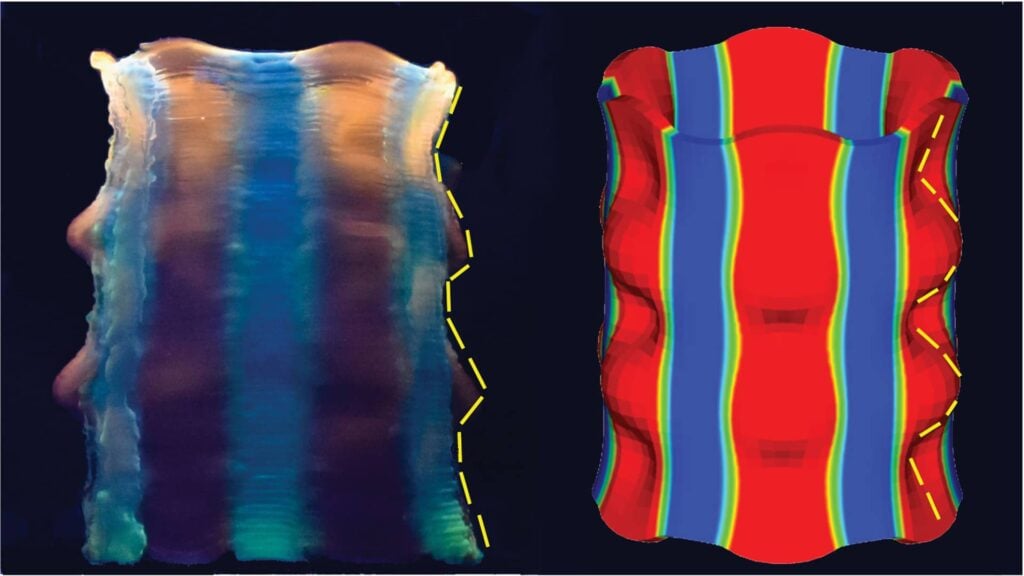
Figure 2: Finite element simulation of the (a) buckling of a composite hydrogel structure (b) a gripper with soft active pNIPAM (red) segments and stiffer passive PAAM (green) segments fabricated by 3D printing. The model shows excellent agreement with simulations.
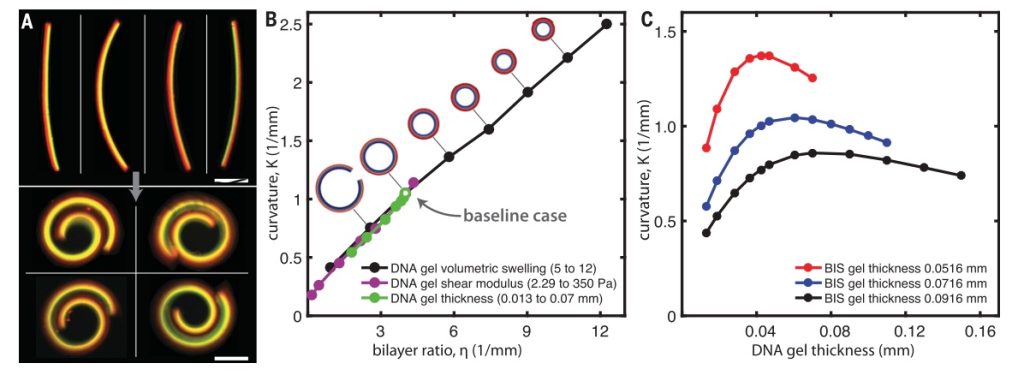
Figure 3: (A) Fluorescence micrographs of photo-patterened hydrogel bilayer beams with a stiffer passive BIS-crosslinked-PAAM layer (green) and soft active DNA-crosslinked-PAAM gel (red). (B) Finite element model predictions of the curvature as a function of a bilayer ratio for the DNA hydrogel bilayer beams. The curvature scales linearly with the bilayer ratio. (C) Analytical predictions of the curvature change using the design rule obtained from the finite element simulation results in B.
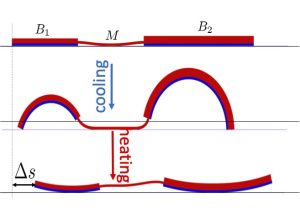
Figure 4. Finite element simulations of the crawling of a hydrogel robot during a cooling and heating cycle. The robot is composed of 2 bilayer beams and a pNIPAM linker. The bilayer beams have an active pNIPAM layer and a passive PAAM layer.
Collaborators
- David Gracias, Ph.D. Professor, Department of Chemical and Biomolecular Engineering, Johns Hopkins University
- Rebecca Schulman , PhD. Professor, Department of Chemical and Biomolecular Engineering, Johns Hopkins University